
Have you ever experienced using your phone’s navigation system to look for an address or landmark, only to discover that what you’re looking for is on the opposite side of the street from where your phone says it is? If so, then it will not surprise you to learn that location positioning on a smartphone is not always accurate.
How positioning works (and why it sometimes doesn’t)
Global Navigation Satellite System (GNSS) receivers, whether in smartphones, cars, or other devices, calculate their position by computing signals from a minimum of four satellites from the available GNSS and regional satellite constellations.[1]The receiver uses the time difference between the broadcast time sent by satellite and the time of signal reception to compute the distance, or range, from the satellite to the receiver. Once the GNSS device receives the signals from multiple satellites, the GNSS device knows the position of each of them and its distance to them. The more satellite signals the GNSS receives, the better the positional accuracy.
The GNSS constellation includes GPS, Galileo, BeiDou and GLONASS. For GPS, Galileo, BeiDou, each satellite transmits its signal over different bands (up to three). This means that older receivers that support only GPS and GLONASS on a single band are less accurate than new devices that support four-constellation and dual-band systems.
Because GNSS satellites orbit at 24,000 km (14913 miles) above the earth, the signal that arrives on the ground is too weak to pass through a roof, dense foliage, or a tunnel. Further, the signal goes through the ionosphere and the troposphere, which also affects its propagation time.
In a dense urban environment, high buildings can also mask the signal from certain satellites, reducing the number of signals available to compute a position. Additionally, high buildings can create a canyon effect that reflects and multiplies signals between the satellite and the receiver, and these “echoes” can affect the range accuracy.
The quality of the GNSS in a smartphone depends on the GNSS receiver (chipset), its positioning engine (software), its antenna quality, and the hardware integration. In addition to pure GNSS positioning, current smartphones use inertial sensors (such as gyroscopes, accelerometers, and barometers) and network-based positioning (which rely on cellphone networks and Wi-Fi). These different technologies help compensate for the lack of GNSS satellite signals.
Of course, mobile phones didn’t always have built-in navigation systems. The first phone to come with integrated GPS capability and built-in maps, the Benefon ESC! from Finnish phone maker Benefon, appeared in 1999 and was primarily sold in Europe, but it set the stage for future GPS-enabled phones.[2] In 2011, the MTS 945 GLONASS, built by Qualcomm and ZTE for Mobile TeleSystems, was the world’s first GLONASS-compatible smartphone.[3]
The Xiaomi Mi 8, which appeared in 2018, was the first dual-frequency GNSS smartphone. Fitted with a Broadcom BCM47755 chip, it could provide up to decimeter-level accuracy for location-based services and vehicle navigation.[4]
Nowadays, all but the least expensive smartphones come with some kind of navigation system. While DXOMARK’s smartphone protocols do not include measuring the accuracy of a device’s GPS positioning, GPS navigation is one of the use cases we evaluate in our Battery protocol. So not long ago, DXOMARK got together with Geoflex, a French company with deep expertise in geolocation and precision positioning, to evaluate the accuracy of smartphone geolocation.
Testing methodology
DXOMARK gathered a large set of devices from different brands and price segments in order to get a general idea of smartphone GPS positioning performance.
To obtain a high-precision reference trajectory, DXOMARK used the Geoflex test platform mounted on top of a car, as shown in the image below:

The test platform was composed of:
- The most accurate multi-constellation (GPS, Galileo, GLONASS, BeiDou) and tri-frequency GNSS receivers on the market with the ability to process the latest signals from the European constellation Galileo (E6); on top of this hardware platform, Geoflex algorithms can compute precise point positioning to achieve an accuracy level of less than 4 centimeters. This is needed to get a good reference track to be compared to the positions delivered by the smartphones under test.
- High-quality GNSS antennas;
- An inertial system coupled with GNSS to improve the reference solution when the GNSS signals are of insufficient quality or absent.
We positioned the test platform in the center of the vehicle to be able to compare all the smartphones’ trajectories on the same point of the central and transverse axes, and we used the data recorded from the setup as a control or reference against which to compare the smartphones’ GPS performance. We mounted the smartphones on a board placed inside the front right of the vehicle, as shown below:

We then took the reference system and the smartphones out on a three-hour drive in the greater Paris area. Our itinerary included urban areas, “dense urban” areas (tall buildings close together), open sky areas, and masked areas such as tunnels, forests, and underpasses. With the exception of open sky areas, each of these environments poses challenges to GPS systems.
We used GNSS Logger software to extract the data we collected, which included:
- The positioning solution in NMEA format[5] generated by each smartphone
- The GNSS observation file containing the satellite data
Further, we analyzed each trajectory in order to generate:
- Positioning in the ECEF (XYZ) coordinate system[6]
- The trajectory in KML[7] format (Google Earth)
- The level of error of each smartphone compared to the reference
Results and details
DXOMARK focused on the positioning error in the horizontal plane, measured as a RMS error, (root mean square), and did not take into account errors in elevation.
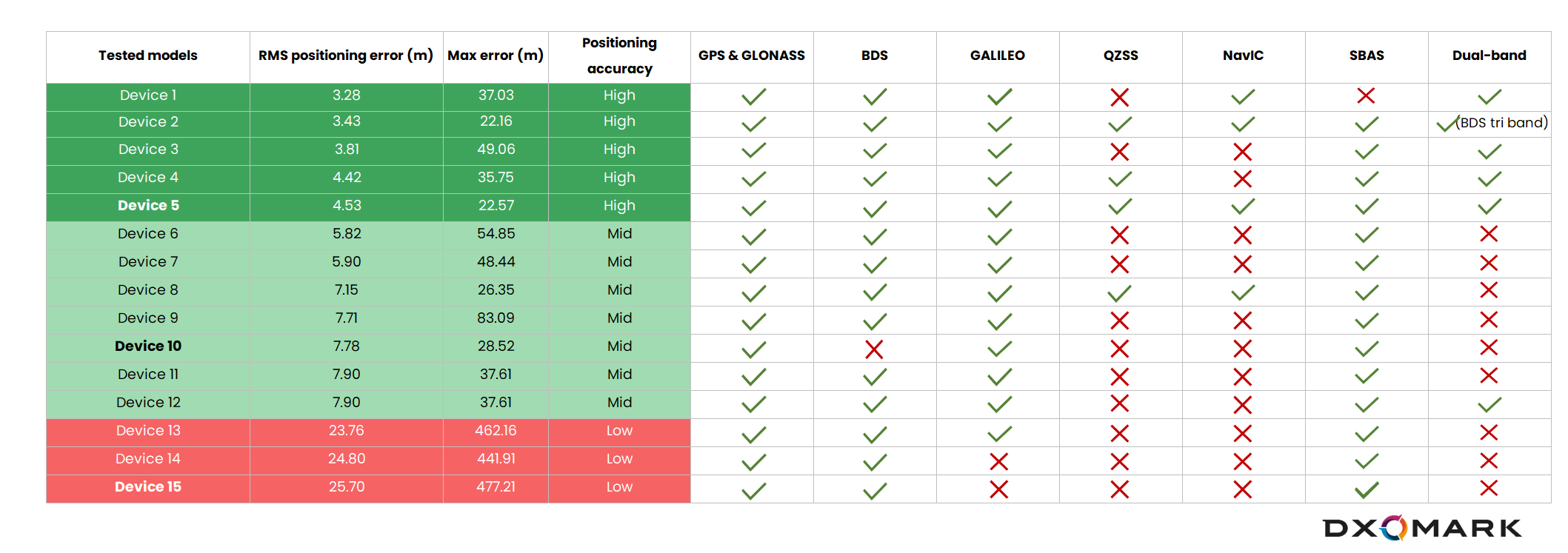
The chart above illustrates the disparities that we observed:
- The dark green section shows the devices that performed very well, with an average error below 5 meters of horizontal error (RMS)
- The light green section shows the phones that had errors above 5 m and up to nearly 8 m (RMS).
- Finally, the red section shows phones that continued to give a position in the tunnels by assuming that the displacement was rectilinear even though the tunnel was curved. For those phones, the error reached 450 m horizontally at the tunnel exit, which resulted in a deviation of more than 20 m from the average values.
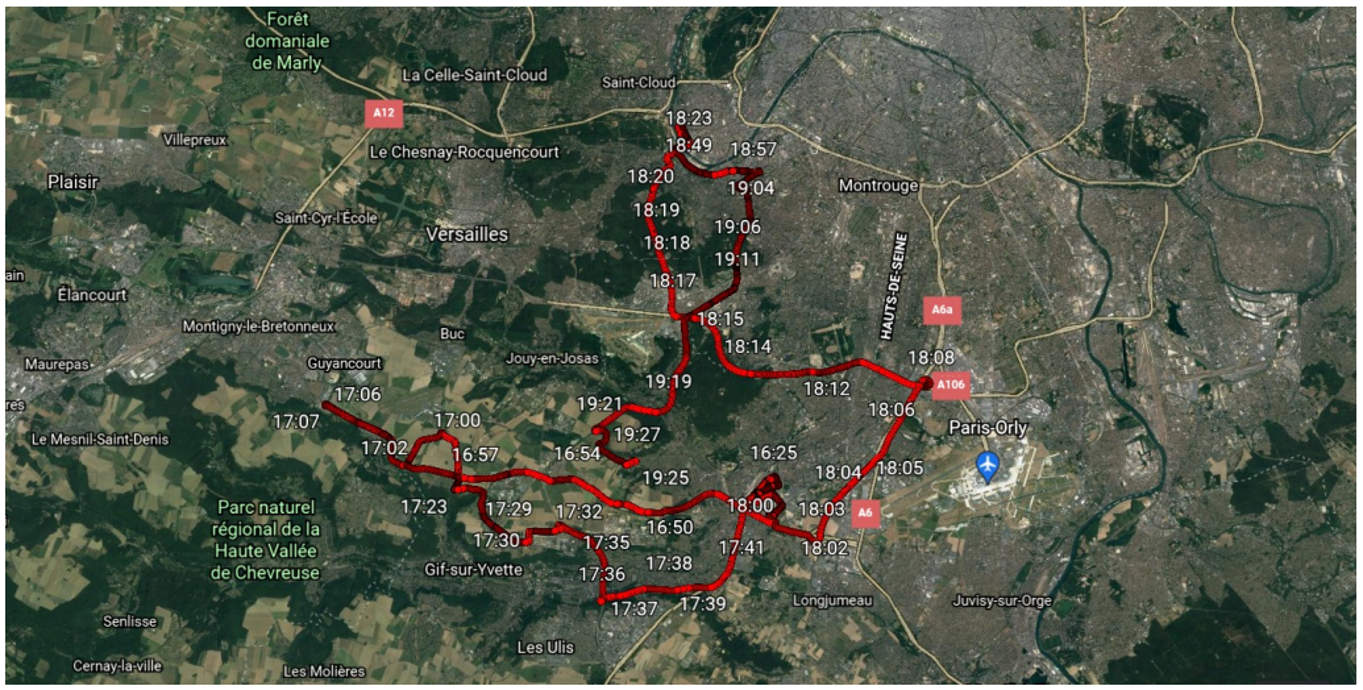
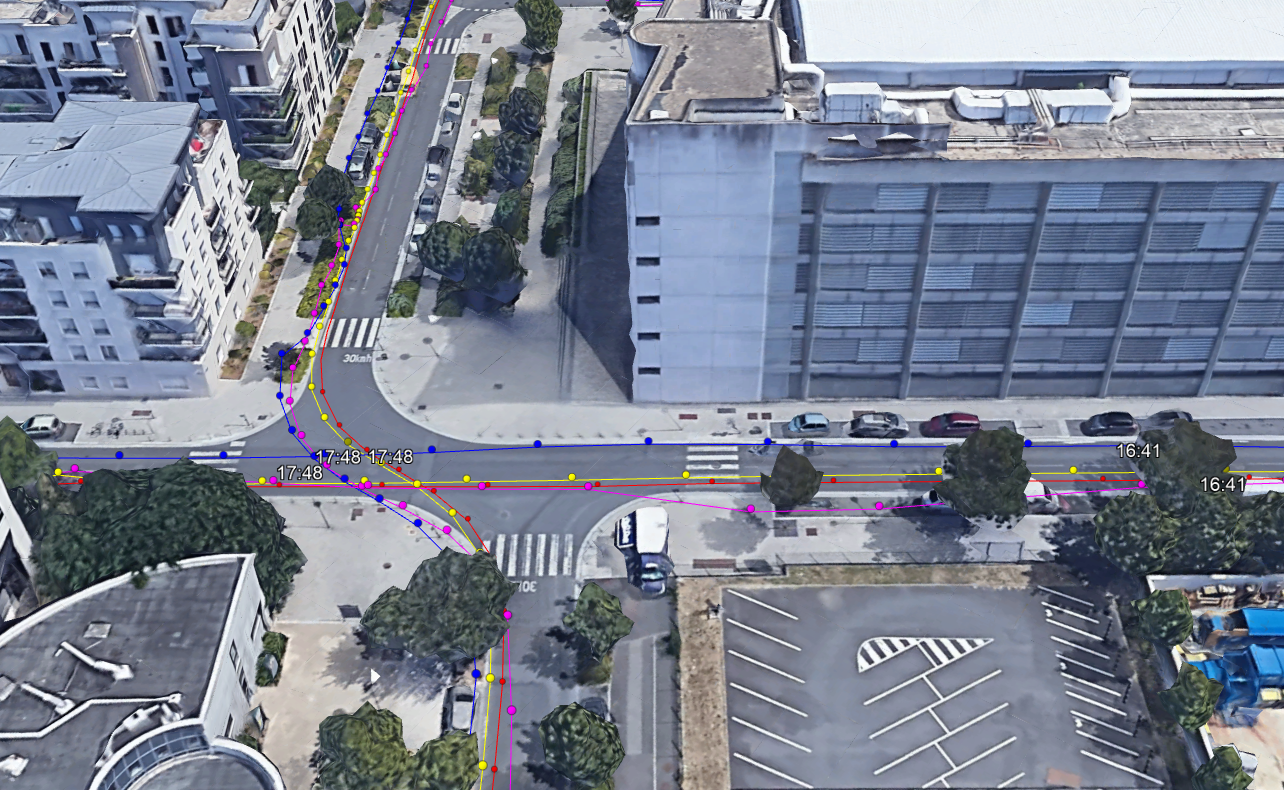
Unsurprisingly, higher-end smartphones with faster processors, better antennas, more constellations as well as dual bands had better GPS results than the more economical models. All the smartphones performed well in open skies because the GNSS and SNR (signal-to-noise) propagation conditions are very good. However, there were significant differences in performance in more difficult conditions, and especially when going through a tunnel. The map diagram below shows the results of three smartphones compared with the reference results (red line): Device 5 (a top performer, yellow), Device 10 (middling results, magenta), and Device 15 (last place in our tests, blue-violet).

Device 10 stopped giving positions in the middle of the tunnel (accuracy limit reached with the accelerometric sensor), while Device 15 continued to give positions that went straight without trajectory quality control (possibly due to a one-axis accelerometer).
By contrast, Device 5 has a 3D gyro sensor and accelerometer that allowed it to follow the curve of the tunnel, which made a difference for the parts of the trajectory without GNSS reception. In fact, Device 5 also had the closest results to the reference track in a dense urban area, as its inertial sensor provided good localization precision between buildings.
Where to from here?
The advent of four-constellation and dual-band navigation satellite technology represented a vast improvement over earlier satellite navigation systems. Newer GNSS receivers, including those that can receive triple-band signals, will become commonplace even in more economical smartphones. But what further improvements can we expect to see as next-generation devices adopt more sophisticated navigation technology, and as demand grows for ever more accurate positioning?
In addition to smartphones, we envision widespread use of GNSS technology in many kinds of embedded electronics, and in devices such as 360° cameras. We think that GNSS correction services will help manufacturers and end users alike to be able to enhance satellite signals and inertial sensor data such that location accuracy will be measured in just centimeters (rather than in meters or even larger distance units). Such accuracy will have a huge impact on human mobility and on a wide variety of services (for example, deliveries by drones).
As for the smartphone Audio, Battery, Camera or Display experience, hardware is only one part of the equation, and software plays the most important part. We can see that devices featuring the same hardware do not get the same precision, and that’s linked to software tuning.
The latest processors also are promising an improvement in accuracy. The Snapdragon 8 Gen 2, is coming out with lane-level accuracy, which could pinpoint a location to within +/- 1.5 meters. That’s something we’d really like to test.
DXOMARK looks forward to seeing how far the next generations of positioning technology will take us!
[1] Global Navigation Satellite System: GPS (Global Positioning System, developed by USA); BeiDou (developed by China); Galileo (developed by EU); GLONASS (developed by Russia). Regional satellite systems: QZSS (Quasi-Zenith Satellite System, developed by Japan); IRNSS (Indian Regional Navigation Satellite System, developed by India)
[2]https://www.mobilephonemuseum.com/
[3] Wikipedia, “MTS 945” https://en.wikipedia.org/wiki/MTS_945
[4] https://www.gsc-europa.eu/news/worlds-first-dual-frequency-gnss-smartphone-hits-the-market
[5] NMEA, defined by the National Marine Electronics Association, is a standard data format supported by all GPS manufacturers, much like ASCII is the standard for digital computer characters in the computer world. The purpose of NMEA is to give equipment users the ability to mix and match hardware and software.
[6] The Earth-Centered, Earth-Fixed (ECEF) coordinate system is also known as the “conventional terrestrial” coordinate system.
[7] KML stands for “Keyhole Markup Language,” a file format that Google developers use to display geographic data.
Geoflex, founded in 2012, is a French company that provides universal hypergeolocation services to many different industries, including transport, smartphones, robot, agricultural machinery, and more. The company works with leading worldwide players — private and public entities — who need precise positioning to power and enhance their critical business processes. https://www.geoflex.fr/
DXOMARK encourages its readers to share comments on the articles. To read or post comments, Disqus cookies are required. Change your Cookies Preferences and read more about our Comment Policy.